nLab rigid monoidal category
Context
Monoidal categories
With braiding
With duals for objects
-
category with duals (list of them)
-
dualizable object (what they have)
-
ribbon category, a.k.a. tortile category
With duals for morphisms
With traces
Closed structure
Special sorts of products
Semisimplicity
Morphisms
Internal monoids
Examples
Theorems
In higher category theory
Contents
Idea
A rigid (monoidal) category, also called an autonomous (monoidal) category is a kind of category with duals. In particular, a rigid monoidal category is a monoidal category in which every object has a dual object .
Depending on whether these duals exist on the right or the left we call the category left rigid or right rigid. Sometimes rigid refers to categories with duals on both sides.
It is important to note that every right/left rigid category can be fully embedded into a category with duals on both sides, by repeatedly applying the double dual functor and taking a colimit (see e.g. Selinger 2011, Proposition 4.7).
Definition
A monoidal category is right rigid (or right autonomous) if every object has a right dual. Similarly, a monoidal category is left rigid (or left autonomous) if every object has a left dual. A monoidal category is autonomous (sometimes called rigid) if duals exist on both sides.
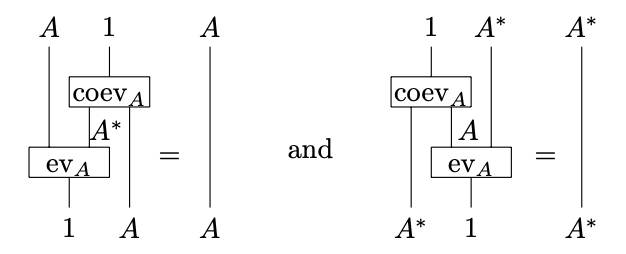
Conventions differ regarding which type of duals are which. One convention is as follows: a right dual of an object in a monoidal category is an object equipped with evaluation/co-evaluation maps
where is the tensor unit, subject to the triangle identities (snake diagrams)
A left dual is an object paired with morphisms and satisfying the dual conditions.
Examples
The canonical example of a rigid category is the category of finite dimensional vector spaces over a field . Namely, given a vector space the standard dual serves as a categorical dual for . Explicitly we have the following:
Proposition
Let be a field. For every vector space , define the maps
and
where is a basis for , and is a dual basis. That is, is defined by
These formulas give well defined -morphisms. Moreover, the satisfy the snake identities and hence give the structure of a (right) rigid category.
Proof
To begin, we verify that the definition of is independent of basis. Suppose is a different choice of basis. There is a change of basis matrix between them. It is straightforward to see that the dual bases are related by the change of basis matrix . Expanding, we thus find that
The definition of the inverse matrix says that . Hence, we conclude that
so is well defined as desired. We now show that the rigidity diagrams commute. Going around the square, we find that this is equivalent to the condition that for all . This follows from choosing a basis such that for some . Then, and all the other terms are zero, making the equality obvious.
Another key example is that of endofunctor categories. Given any category , the hom-space of functors is a monoidal category, with the monoidal structure coming from composition. Duals correspond to adjoint functor as can be stated formally below:
Proposition
Let be a category, and let be an endofunctor. Let be the right adjoint of . is a right dual for , under the natural transformations
where we here make the implicit identification
using adjointness, and
where we here make the implicit identification
using adjointness. Conversely, if is a right dual for an endofunctor then is a right adjoint for .
Proof
Verifying the details is straightforward.
Graphical language
Rigid categories are best expressed using the language of string diagrams. That is, we can write the rigidity axioms as
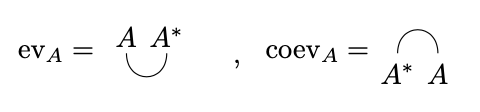
Even better, we often fix graphical notation for and which makes these axioms even simpler to write out:
We can now express rigidity as follows:
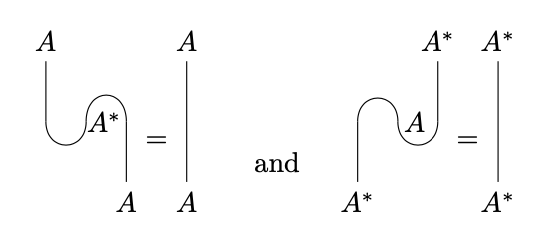
Rigidity is thus graphically the statement that string diagrams can be “straightened out”. This approach is taken, for example, in Selinger.
Remarks
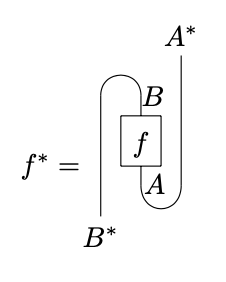
Note that this definition only asserts the existence of the dual objects. It does not assert that specific duals have been chosen. However, the choice of duals is unique up to unique isomorphism, justifying reference to ‘the’ dual of an object; in fact, this extends to a contravariant anafunctor . (Using the axiom of choice to pick duals for every object at once, we can make this into a strict functor.) This functor is defined explicitly by the formula
This formula is clearer when written graphically:
Additionally, this definition does not assert that the right dual of an object is isomorphic to its left dual: this need not be the case in general, though it is true in a braided monoidal category, and thus automatically also in a symmetric monoidal category (this last fact can be considered an algebraic form of the “Whitney trick” for knots; see this MO discussion). Left duals and right duals are also isomorphic in a semisimple category. Note that a rigid monoidal category which is also symmetric is sometimes called compact closed, or simply “compact”.
In practice, algebraic geometers are the most frequent users of the term ‘rigid’, and they focus on the symmetric monoidal case, so they ignore the difference between right and left duals.
Properties
Tannaka duality
The statement of Tannaka duality for associative algebras says that rigid monoidal categories equipped with a fiber functor are categories of modules over a Hopf algebra.
Tannaka duality for categories of modules over monoids/associative algebras
| monoid/associative algebra | category of modules |
|---|---|
| -algebra | -2-module |
| sesquialgebra | 2-ring = monoidal presentable category with colimit-preserving tensor product |
| bialgebra | strict 2-ring: monoidal category with fiber functor |
| Hopf algebra | rigid monoidal category with fiber functor |
| hopfish algebra (correct version) | rigid monoidal category (without fiber functor) |
| weak Hopf algebra | fusion category with generalized fiber functor |
| quasitriangular bialgebra | braided monoidal category with fiber functor |
| triangular bialgebra | symmetric monoidal category with fiber functor |
| quasitriangular Hopf algebra (quantum group) | rigid braided monoidal category with fiber functor |
| triangular Hopf algebra | rigid symmetric monoidal category with fiber functor |
| supercommutative Hopf algebra (supergroup) | rigid symmetric monoidal category with fiber functor and Schur smallness |
| form Drinfeld double | form Drinfeld center |
| trialgebra | Hopf monoidal category |
2-Tannaka duality for module categories over monoidal categories
| monoidal category | 2-category of module categories |
|---|---|
| -2-algebra | -3-module |
| Hopf monoidal category | monoidal 2-category (with some duality and strictness structure) |
| quasitriangular Hopf 2-algebra | braided monoidal 2-category |
3-Tannaka duality for module 2-categories over monoidal 2-categories
| monoidal 2-category | 3-category of module 2-categories |
|---|---|
| -3-algebra | -4-module |
Free rigid monoidal categories
The inclusion of the 2-category of monoidal categories into the 2-category of rigid monoidal categories admits a left 2-adjoint functor? .
Furthermore, the unit of the adjunction is a strong monoidal fully faithful functor, i.e., any monoidal category admits a fully faithful strong monoidal functor , where is a rigid monoidal category.
See Theorems 1 and 2 in Delpeuch.
References
-
N. Saavedra Rivano, “Catégories Tannakiennes.” Bulletin de la Société Mathématique de France 100 (1972): 417-430. EuDML
-
Antonin Delpeuch, Autonomization of monoidal categories, arXiv, doi.
-
Peter Selinger, A survey of graphical languages for monoidal categories, New structures for physics, arXiv
Related concepts
Last revised on January 7, 2025 at 18:54:58. See the history of this page for a list of all contributions to it.