nLab manifold
Context
Manifolds and cobordisms
manifolds and cobordisms
cobordism theory, Introduction
Definitions
Genera and invariants
Classification
Theorems
Geometry
higher geometry / derived geometry
Ingredients
Concepts
-
geometric little (∞,1)-toposes
-
geometric big (∞,1)-toposes
Constructions
Examples
-
derived smooth geometry
Theorems
Contents
Idea
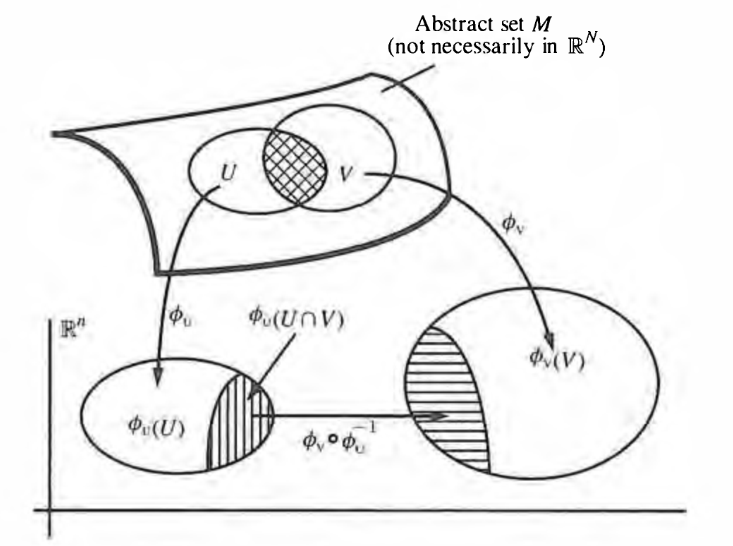
A manifold is a topological space which looks locally like a Cartesian space, commonly a finite-dimensional Cartesian space , in which case one speaks of a manifold of dimension or -fold, but possibly an infinite-dimensional topological vector space, in which case one has an infinite-dimensional manifold.
What “locally looks like” means depends on what sort of structure we are considering a Cartesian space to embody. At one extreme, we can think of as merely a topological space. Or, may be considered as carrying more rigid types of structure, such as -differential structure, smooth structure, piecewise-linear (PL) structure, real analytic structure, affine structure, hyperbolic structure, foliated structure, etc., etc. Accordingly we have notions of topological manifold, differentiable manifold, smooth manifold, analytic manifold etc. By default these are modeled on finite dimensional spaces, but most notions have generalizations to a corresponding notion of infinite dimensional manifold.
graphics grabbed from Frankel
In any case, the type of geometry embodied in a particular flavor of manifold is controlled by a particular groupoid or, more generally, category of transformations which preserves whatever geometric features one is interested in; cf. Felix Klein’s Erlanger Programm.
Definitions
Here we will focus on the general notion of a manifold. More concrete examples can be found in individual pages such as topological manifold and smooth manifold.
We will present two possible definitions. The first, via pseudogroups, has a simpler definition, but has two (rather serious) drawbacks:
- There is in general no notion of morphisms between manifolds. At best, we can only talk about isomorphisms of manifolds.
- We can only define smooth -manifolds for each separately, but not smooth manifolds in general (and the same applies to complex manifolds etc.)
The second definition via cartologies was proposed by Todd Trimble to solve the above two problems.
Definition via pseudogroups
The setting is a topological space together with a pseudogroup on . For the sake of concreteness, the reader may as well focus on the case and is the groupoid of diffeomorphisms between open subsets of .
Definitions
Definition
A chart on a topological space is an open subset of together with an open embedding
Two charts and are -compatible if
belongs to .
Definition
A -atlas on a topological space is a family of -compatible charts , def. , such that covers . The (restricted) maps are called transition functions between the charts of the atlas.
Definition
A -manifold is a topological space equipped with a -atlas (definition ).
Remark
This means that we can think of a -manifold as a space which is locally modeled on according to the geometry .
Remark
It is almost invariably the case in classical manifold theory that one requires some technical niceness properties on the topological space underlying a manifold.
Usually, in the definition of manifold it is understood that the underlying topological space
-
is a Hausdorff topological space (if not one usually speaks explicitly of a non-Hausdorff manifold)
Often it is also assumed that the topology has a countable basis as well.
In many of the typical cases, this will mean that is metrizable. In many studies, for example in cobordism theory, one goes even further and assumes the manifolds are compact.
Remark
An atlas is not considered an essential part of the structure of a manifold: two different atlases may yield the same manifold structure. This is encoded by the following definition of isomorphisms between manifolds.
Examples
If the term “manifold” appears without further qualification, what is usually meant is a smooth -manifold of some natural number dimension : a -manifold where is the pseudogroup of invertible maps between open sets of . Replacing here by a half-space , one obtains the notion of smooth manifold with boundary. Or, replacing here by the -cube , one obtains the notion of (smooth) -manifold with (cubical) corners. Morphisms of manifolds are here called smooth maps, and isomorphisms are called diffeomorphisms. (In manifold theory, one usually reserves the term smooth function for smooth maps to .)
A topological -manifold is a manifold with respect to the pseudogroup of homeomorphisms between open sets of . Any continuous function between topological manifolds is a morphisms, and any homeomorphism is an isomorphism. A piecewise-linear (PL) -manifold is where the pseudogroup consists of piecewise-linear homeomorphisms between such open sets; morphisms are called piecewise-linear (PL) maps.
One can go on to define, in a straightforward way, real analytic manifolds, complex analytic manifolds, elliptic manifolds, hyperbolic manifolds, and so on, using the general notion of pseudogroup.
Any space can always be turned into a manifold modelled on itself, using any pseudogroup . Simply take the inclusions of open sets as charts.
Isomorphisms of manifolds
Definition
An isomorphism of -manifolds (defined by chosen atlas structures, def. ) is a homeomorphism such that
is in whenever is a coordinate chart, def. of , and is a coordinate chart of .
If and are two -manifold structures on the same topological space , then and are considered equal as -manifolds if is an isomorphism from to (and hence also from to ).
Alternatively, atlases are ordered by inclusion, and two atlases define the same manifold structure on if they have a common upper bound. Equivalently, two atlases define the same manifold structure if each chart of one is compatible with each chart of the other. Or, one could extend any atlas to the (unique) maximal atlas containing it, which consists of all charts compatible with each of the charts in the original atlas, and simply identify a manifold structure with a maximal atlas.
Rafael: Can one define a manifold object in a category C as a G-manifold with G related to C? What would the relation between G and C be to obtain G-manifolds in C as manifold objects?
Toby: Yes, I think that this would make perfect sense; I think that we'd want to be an internal groupoid in . Note that defining things like ‘smooth manifold’ in might still be difficult, but we've reduced it to internalising Cart Sp in . (There's also the matter that the above definition takes a notion of space for granted, so you'd have to internalise that into too, but I'm not sure how important that really is, when I think about how the topology on a smooth manifold can be recovered from the smooth structure.)
Rafael: Can someone that knows more than me about this add the result of this question to this article so nobody have to ask again.
Toby: I'd rather not, since it's all ‘I think’ and ‘might be difficult’; it's better as a query box, moved to the bottom if necessary. But if Todd agrees with me, then maybe he'll add it.
Definition via cartologies
Note: the following is tentative “original research”. It is prompted by the desire to extend the pseudogroup approach for defining general notions of manifold, so as to cover also an appropriate general notion of “map”. Comments, improvements, and corrections are encouraged – Todd.
I've read through it once, and it makes sense. I'll read through it again more carefully later. —Toby
We begin by defining the 2-poset (i.e., locally preordered bicategory) of regions, denoted . The objects are topological spaces (or locales if you prefer); the morphisms are partial functions with open domain, that is spans
where is continuous and is an open embedding. The spans are locally (that is, for fixed and ) ordered by inclusion.
These local posets are not cocomplete, but they admit certain obvious joins: given a family of regional maps
the join exists iff we have local compatibility:
for all . Notice that composition on either side with a -cell preserves any local joins which exist.
Every coreflexive morphism in splits: there is a map in ,
whose opposite also belongs to (that is, is an open embedding), and the equations
hold. The object may be called the extension of . This splitting is a kind of comprehension principle? familiar from the theory of allegories, among other things.
A cartology is a (locally full) subbicategory such that
- (Closure under open subspaces) If and in , then and its opposite are morphisms of .
- (“Sheaf condition”) The inclusion reflects and preserves local joins.
Intended examples include the case where the objects of are Euclidean spaces , and morphisms are spans
where is smooth.
Given a cartology , a morphism in is pseudo-invertible if there exists such that and .
Lemma
In a cartology, the pseudo-invertible morphisms from an object to itself form a pseudogroup (as defined earlier).
The notion of a -manifold modeled on an object of is defined just as before, using the pseudogroup on implied by the previous lemma. In particular, we have -charts of an atlas structure on , which are morphisms in
satisfying the expected properties. We can thus speak of -manifolds (or -manifolds if we want to make explicit the modeling space ).
Now, given a cartology , we define the category of -manifolds. Let be a -manifold and a -manifold. Then, a -morphism from to is a continuous map such that the -composite
belongs to , for every pair of charts and .
These definitions need to be carefully checked against known examples (e.g., the categories , , and , among others).
Generalizations
-
- Euclidean supermanifold (notice that the definition of that is very much along the lines of the Klein-program-style definition above).
Related concepts
References
For more see the references at differentiable manifold and smooth manifold.
The vision of the modern notion of manifolds is attributed to:
-
Bernhard Riemann, Über die Hypothesen, welche der Geometrie zu Grunde liegen, Göttingen (1845) [doi:10.1007/978-3-642-35121-1]
Engl. transl: William Clifford: On the hypotheses which underlie geometry, Nature VIII (1873) 183-184 [doi:10.1007/978-3-319-26042-6]
See also:
- John Loftin, The real definition of a smooth manifold (pdf)
Last revised on May 17, 2026 at 13:46:59. See the history of this page for a list of all contributions to it.