nLab separation axioms
This is about the separation axioms in topology. For the axiom in set theory also called “separation”, see axiom of separation.
Context
Topology
topology (point-set topology, point-free topology)
see also differential topology, algebraic topology, functional analysis and topological homotopy theory
Basic concepts
-
fiber space, space attachment
Extra stuff, structure, properties
-
Kolmogorov space, Hausdorff space, regular space, normal space
-
sequentially compact, countably compact, locally compact, sigma-compact, paracompact, countably paracompact, strongly compact
Examples
Basic statements
-
closed subspaces of compact Hausdorff spaces are equivalently compact subspaces
-
open subspaces of compact Hausdorff spaces are locally compact
-
compact spaces equivalently have converging subnet of every net
-
continuous metric space valued function on compact metric space is uniformly continuous
-
paracompact Hausdorff spaces equivalently admit subordinate partitions of unity
-
injective proper maps to locally compact spaces are equivalently the closed embeddings
-
locally compact and second-countable spaces are sigma-compact
Theorems
Analysis Theorems
The separation axioms
Idea
The plain definition of topological space happens to allow examples where distinct points or distinct subsets of the underlying set of a topological space appear as as more-or-less unseparable as seen by the topology on that set. In many applications one wants to exclude at least some of such degenerate examples from the discussion and instead focus on sufficiently nice topological spaces. The relevant conditions to be imposed on top of the plain axioms of a topological space are hence known as separation axioms.
These axioms are all of the form of saying that two subsets (of certain forms) in the topological space are ‘separated’ from each other in one sense if they are ‘separated’ in a (generally) weaker sense. Most of these conditions can be expressed as lifting properties with respect to maps of finite topological spaces or the real line. For example the weakest axiom (called ) demands that if two points are distinct as elements of the underlying set, then there exists at least one open subset that contains one but not the other, i.e. the function determined by two distinct points is not continuous as a map from the indiscrete space. In other words, says that each continuous function from the indiscrete space is necessarily trivial. As a lifting property this is expressed as: the map collapsing the indiscrete space with two points into a single point, has the left lifting property with respect to the map collapsing the underlying space into a single point.
In this fashion one may impose a hierarchy of stronger axioms. For example demanding that given two distinct points, then each of them is contained in some open subset not containing the other (), i.e. any map from the space with one open point and one closed is necessarily trivial, or that such a pair of open subsets around two distinct points may in addition be chosen to be disjoint (); such a pair of open subsets can be equivalently described as a continuous function to the space with two open points and one closed, and as saying that the inclusion of two open points into the space with two points and one closed, factors via any injective function from the space with two points, to the underlying space.
This last condition, , also called the Hausdorff condition is the most common among all separation axioms. Often (but by far not always) this is considered by default.
As a lifting property, is expressed as: the map collapsing the space with one point open and one point closed into a single point, has the left lifting property with respect to the map collapsing the underlying space into a single point. is expressed as: any injective map from the discerete space with two points into the space, has the left lifting proprety with respect to the map collapsing the space with one closed point and two open points into a single point.
Rewriting the separation axioms in terms of lifting properties with respect to maps of finite topological spaces, i.e. monotone maps of preorders, provides a combinatorial point of view on this hierachy, and simplifies certain universal constructions such as reflection or Kolmogorov quotient.
The main separation axioms are these:
the main separation axioms
| number | name | statement | reformulation |
|---|---|---|---|
| Kolmogorov | given two distinct points, at least one of them has an open neighbourhood not containing the other point | every irreducible closed subset is the closure of at most one point | |
| given two distinct points, both have an open neighbourhood not containing the other point | all points are closed | ||
| Hausdorff | given two distinct points, they have disjoint open neighbourhoods | the diagonal is a closed map | |
| and… | all points are closed and… | ||
| regular Hausdorff | …given a point and a closed subset not containing it, they have disjoint open neighbourhoods | …every neighbourhood of a point contains the closure of an open neighbourhood | |
| normal Hausdorff | …given two disjoint closed subsets, they have disjoint open neighbourhoods | …every neighbourhood of a closed set also contains the closure of an open neighbourhood … every pair of disjoint closed subsets is separated by an Urysohn function | |
| completely normal Hausdorff | |||
| perfectly normal Hausdorff |
In terms of lifting properties
The separation conditions to may equivalently be understood as lifting properties against certain maps of finite topological spaces, among others.
This is discussed at separation axioms in terms of lifting properties, to which we refer for further details. Here we just briefly indicate the corresponding lifting diagrams.
In the following diagrams, the relevant finite topological spaces are indicated explicitly by illustration of their underlying point set and their open subsets:
-
points (elements) are denoted by with subscripts indicating where the points map to;
-
boxes are put around open subsets,
-
an arrow means that is in the topological closure of .
In the lifting diagrams for below, an arrow out of the given topological space is a map that determines (classifies) a decomposition of into a union of subsets with properties indicated by the picture of the finite space.
Notice that the diagrams for - below do not in themselves imply .
Proposition
(Lifting property encoding )
The following lifting property in Top equivalently encodes the separation axiom :
Proposition
(Lifting property encoding )
The following lifting property in Top equivalently encodes the separation axiom :
Proposition
(Lifting property encoding )
The following lifting property in Top equivalently encodes the separation axiom :
Proposition
(Lifting property encoding )
The following lifting property in Top equivalently encodes the separation axiom :
Proposition
(Lifting property encoding )
The following lifting property in Top equivalently encodes the separation axiom :
Originally in Tietze 23 the four separation axioms were considered (see at History below for more); nowadays one considers various more. Besides the extrapolation of the original sequence from through (with and interpolated), there is a similar sequence of axioms called (with their extrapolations and interpolations) of the same form, except that they do not start with mentioning two set-theoretically distinct points, but two points satisfying the conclusion of . This and more is spelled out below.
There are also axioms that do not follow the pattern of “if certain two subsets are separated in some weak sense, then they are also separated in some stronger sense”, but that still axiomatize some kind of separatedness. For example the condition on a topological space being sober is of a different nature, but is implied by and implies . Notice that via their full embedding into locales, sober topological spaces may be understood without reference to their underlying set of points at all.
All separation axioms are satisfied by metric spaces, from whom the concept of topological space was originally abstracted. Hence imposing some of them may also be understood as gauging just how far one allows topological spaces to generalize away from metric spaces.
Several separation axioms may also be interpreted in broader contexts that plain topological spaces, for instance for convergence space or for locales; or the may be considered under weaker assumptions, such as those of constructive mathematics and predicative mathematics.
The classical theory
First, we will consider how, for topological spaces in classical mathematics, the separation axioms are about sets' being ‘separated’ as stated above. Throughout, fix a topological space .
Separation conditions
Fix two sets (subsets) and of .
-
The sets and are disjoint if their intersection is empty:
-
They are topologically disjoint if there exists a neighbourhood of one set that is disjoint from the other set:
Notice that topologically disjoint sets must be disjoint.
-
They are separated if each set has a neighbourhood that is disjoint from the other set:
Notice that separated sets must be topologically disjoint.
-
They are separated by neighbourhoods if they have disjoint neighbourhoods:
Notice that sets separated by neighbourhoods must be separated.
-
They are separated by closed neighbourhoods if they have disjoint closed neighbourhoods:
Notice that sets separated by closed neighbourhoods must be separated by neighbourhoods.
-
They are separated by a function if there exists a continuous real-valued function on the space that maps to and to :
Notice that sets separated by a function must be separated by closed neighbourhoods (the preimages of and ).
-
Finally, they are precisely separated by a function if there exists a continuous real-valued function on the space that maps precisely to and to :
Notice that sets precisely separated by a function must be separated by a function.
Often and will be points (identified with their singleton subsets); in that case, one usually says distinct in place of disjoint.
Often or will be closed sets; notice that disjoint closed sets are automatically separated, while a closed set and a point, if disjoint, are automatically topologically disjoint.
Separation axioms
The classical separation axioms are all statements of the form
- When is a (point/closed) set and is a (point/closed) set, if and are (separated in some weak sense), then they are (separated in some strong sense).
The axioms with names (at least with known to the authors so far of this article) are summarised in the tables below. When a row or column is missing from a table, either no name is known or the implication follows from the converses mentioned after the separation conditions above in the context of that table; there are two potential tables that are completely blank for the latter reason. When an entry in a table is repeated, that corresponds to a theorem that one separation axiom implies another.
When both sets are points:
| Stronger condition ↓\Weaker condition → | Distinct | Topologically distinct |
|---|---|---|
| Topologically distinct | ||
| Separated | ||
| Separated by neighbourhoods | ||
| Separated by closed neighbourhoods | ||
| Separated by a function | Completely | Completely |
When one set is a point and the other is closed:
| Stronger condition ↓\Weaker condition → | Disjoint |
|---|---|
| Separated by neighbourhoods | Regular |
| Separated by closed neighbourhoods | Regular |
| Separated by a function | Completely regular |
When both sets are closed:
| Stronger condition ↓\Weaker condition → | Disjoint |
|---|---|
| Separated by neighbourhoods | Normal |
| Separated by closed neighbourhoods | Normal |
| Separated by a function | Normal |
| Precisely separated by a function | Perfectly normal |
When the sets are arbitrary:
| Stronger condition ↓\Weaker condition → | Separated |
|---|---|
| Separated by neighbourhoods | Completely normal (T5) |
Reformulation in terms of topological closures
Many of the separation axioms have a useful equivalent formulation in terms of certain topological closures.
Proposition
( in terms of topological closures)
A topological space is precisely if the function from the underlying set of to the set of irreducible closed subsets of , is injective:
(This statement also motivates the definition of sober topological spaces, for which is required to be a bijection).
Proof
Assume first that is . Then we need to show that if are such that then . Hence assume that . Since the closure of a point is the complement of the union of the open subsets not containing the point (lemma ), this means that the union of open subsets that do not contain is the same as the union of open subsets that do not contain :
But if the two points were distinct, , then by one of the above unions would contain or , while the other would not, in contradiction to the above equality. Hence we have a proof by contradiction.
Conversely, assume that , and assume that . Hence by contraposition . We need to show that there exists an open set which contains one of the two points, but not the other.
Assume there were no such open subset. By lemma this lemma this would mean that and that . But this would imply that and that , hence that . This is a proof by contradiction.
Proposition
( in terms of topological closures)
A topological space is precisely if all its points are closed points.
Proof
Assume first that is . We need to show that for every point we have . Since the closure of a point is the complement of the union of all open subsets not containing this point, this is the case precisely if the union of all open subsets not containing is , hence if every point is member of at least one open subset not containing . This is true by .
Conversely, assume that for all then . Then for two distinct points we need to produce an open subset of that does not contain . But as before, since is the complement of the union of all open subsets that do not contain , and the assumption means that is member of one of these open subsets that do not contain .
Proposition
( in terms of topological closures)
A topological space is =Hausdorff precisely if the image of the diagonal
is a closed subset in the product topological space .
Proof
The Hausdorff condition, that for then there exist disjoint open neighbourhood , is equivalently rephrased in terms of the product topology as: Every point which is not on the diagonal has an open neighbourhood which still does not intersect the diagonal.
Hence if is Hausdorff, then the diagonal is the complement of a union of such open sets, and hence is closed.
Conversely, if the diagonal is closed, then (by this lemma) every point not on the diagonal, hence with , has an open neighbourhood still not intersecting the diagonal, hence so that . Thus is Hausdorff.
Remark
The characterization of the Hausdorff separation condition via the closure of the diagonal in prop. is the basis for the definition of separated scheme.
Proposition
( in terms of topological closures)
A topological space is regular, precisely if for all closed subsets with open neighbourhood there exists a smaller open neighbourhood whose topological closure is still contained in :
The proof of prop. \re{T3InTermsOfTopologicalClosures} is the direct specialization of the following proof for prop. to the case that (using that by , which is part of the definition of , the singleton subset is indeed closed by prop. ).
Proposition
( in terms of topological closures)
A topological space is normal, precisely if for all closed subsets with open neighbourhood there exists a smaller open neighbourhood whose topological closure is still contained in :
Proof
In one direction, assume that is normal, and consider . It follows that the complement of the open subset is closed and disjoint from :
Therefore by assumption of normality of , there exists open neighbourhoods and with
But this means that
and since the complement of the open set is closed, it still contains the closure of , so that we have
In the other direction, assume that for every open neighbourhood of a closed subset there exists a smaller open neighbourhood with . Consider disjoint closed subsets . We need to produce disjoint open neighbourhoods for them.
From their disjointness it follows that is an open neighbourhood. Hence by assumption there is an open neighbourhood with
Thus and are two disjoint open neighbourhoods, as required.
Relations between the axioms
First of all, notice (prop. ) that the condition, saying that distinct points are separated, is equivalent to the condition that every point is closed. Thus, serves as a linchpin between conditions on points and conditions on closed sets.
Many implications between separation axioms can be seen in the following Hasse diagram:
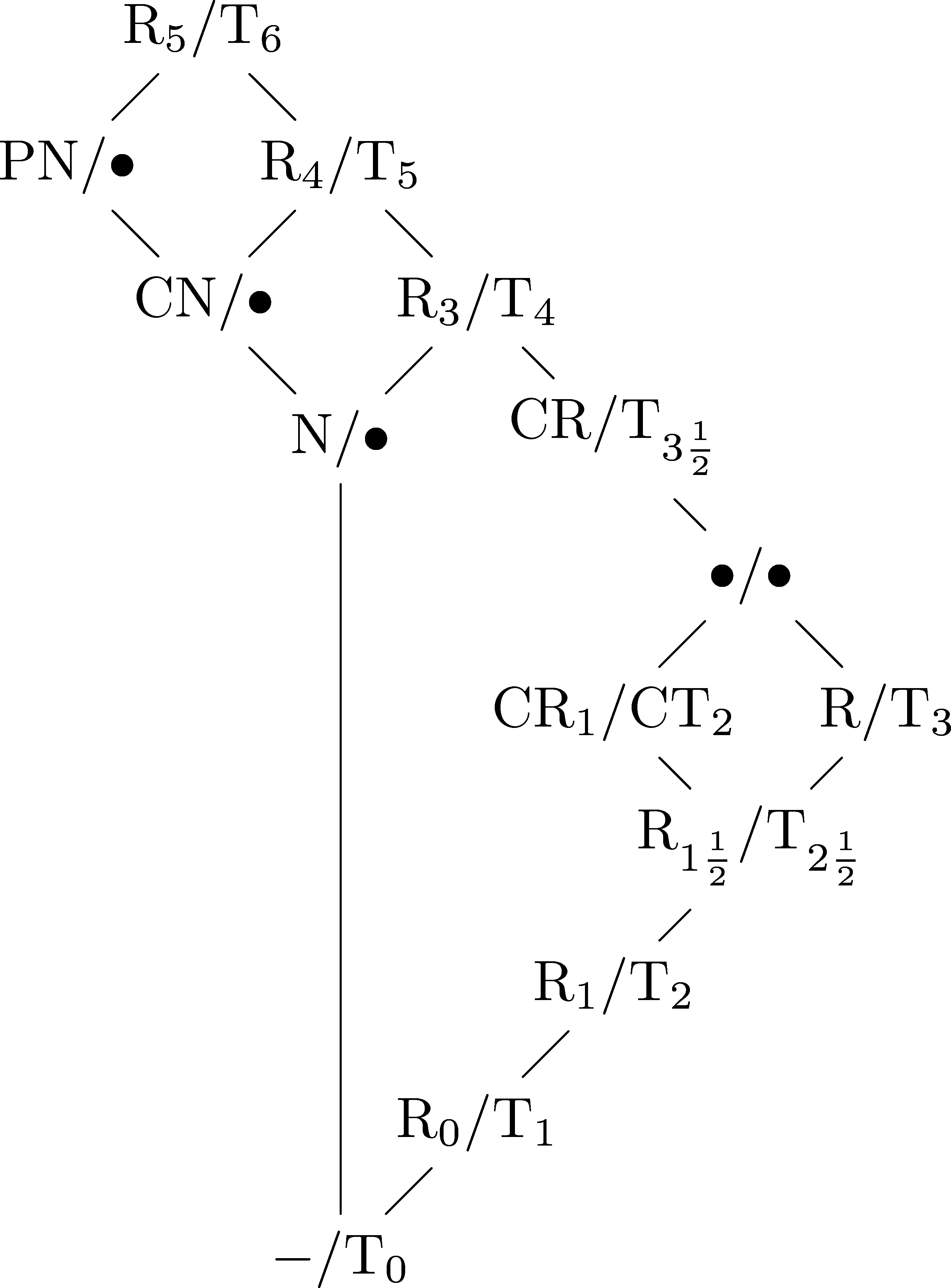
Here, there are two entries at each node; the one on the right includes the axiom, while the one on the left does not. This diagram shows the separation axioms as a meet sub-semilattice of the lattice of all conditions on topological spaces; for example, you can see, by following the diagram upwards, that any space that is both normal and regular must be . And since never appears in the tables above, you can take this as a definition of .
In general, the names in this diagram are:
- ‘P’ for ‘perfectly’,
- ‘C’ for ‘complete’,
- ‘N’ for ‘normal’,
- ‘R’ (without a subscript) for ‘regular’
- ‘T’ or ‘R’ with a subscript are written and pronounced that way.
Warning: for has been used in different ways in the past, and perhaps by some schools still. Also, all of the terms are rare. It is safest to say, for example, ‘normal Hausdorff’ for and clearer to say, for example, ‘normal regular’ for . If you want to avoid the subscript terms entirely, then you can, by doing the above and the following:
- = Urysohn
- = Hausdorff,
- = accessible,
- = Kolmogorov,
- = reciprocal,
- = symmetric.
On the other hand, if you want to use more symbols, then you can:
- = regular,
- = completely regular.
It would be easy to invent an series for the various kinds of normal spaces, but nobody seems to have done so yet.
Other terms are also in use, principally ‘Tychonoff’ for completely regular Hausdorff ().
Reflection
(cf. Herrlich & Strecker 1971)
Proposition
(-reflection)
Let . Then for every topological space there exists a -topological space and a continuous function of the forma
which is the “closest approximation from the left” to by a -topological space, in that for any -space, then continuous functions of the form
are in bijection with continuous function of the form
and such that the bijection is constituted by
Here is called the -reflection of .
-
For this is known as the Kolmogorov quotient construction (see prop. below).
-
For this is known as Hausdorff reflection or Hausdorffication or similar.
Moreover, the operation extends to continuous functions
such as to preserve composition of functions as well as identity functions:
Finally, the comparison map is compatible with this in that for all continuous functions then
hence then follows squares commutes:
We give a proof of the existence of this reflection below as the proof of prop. .
Remark
In the language of category theory the -reflection of prop. says that
-
is a functor from the category Top of topological spaces to the full subcategory of Hausdorff topological spaces;
-
is a natural transformation from the identity functor on Top to the functor
-
-topological spaces form a reflective subcategory of all topological spaces in that is left adjoint to the inclusion functor ; this situation is denoted as follows:
Generally, an adjunction between two functors
is for all pairs of objects , a bijection between sets of morphisms of the form
i.e.
and such that these bijections are “natural” in that they for all pairs of morphisms and then the folowing diagram commutes:
There are various ways to see the existence and to construct the -reflections. The following is the quickest way to see the existence, even if to some tastes the construction seems more implicit or abstract than the previous one.
Proposition
(-reflection via surjections into -spaces)
Let . Let be a topological space and consider the equivalence relation on the underlying set for which precisely if for every surjective continuous function into any -topological space we have .
Then the set of equivalence classes
equipped with the quotient topology is a -topological space, and the quotient map exhibits the -reflection of , according to prop. .
Proof
First we observe that every continuous function into a -topological space factors uniquely via through a continuous function
where
To see this, first factor through its image
equipped with its subspace topology as a subspace of . It follows that is a -topological space if is.
It follows by definition of that the factorization exists at the level of sets as stated, since if have the same equivalence class in , then by definition they have the same image under all continuous surjective functions to a -space, hence in particular under . This means that as above is well defined. Moreover, it is clear that this is the unique factorization.
To see that is continuous, consider an open subset. We need to show that is open in . But by definition of the quotient topology, this is open precisely if its pre-image under the quotient projection is open, hence precisely if
is open in . But this is the case by the assumption that is continuous.
What remains to be seen is that as constructed is indeed a -topological space. Hence assume that are two distinct points. We need to open neighbourhoods around one or both of these point not containing the other point and possibly disjoint to each other.
Now by definition of this means that there exists a -topological space and a surjective continuous function such that . Accordingly, since is , there exist the respective kinds of neighbourhoods around these image points in . Moreover, by the previous statement there exists a continuous function with and . By the nature of continuous functions, the pre-images of these open neighbourhoods in are still open in and still satisfy the required disjunction properties. Therefore is a -space.
Here are alternative constructions of the reflections:
Proposition
Let be a topological space. Consider the relation on the underlying set by which precisely if neighther has an open neighbourhood not containing the other. This is an equivalence relation. The quotient topological space by this equivalence relation exhibits the -reflection of according to prop. .
Proposition
For a topological space, write for the transitive closure of tthe relation given by the topological closure of the image of the diagonal .
Now for a topological space, define by induction for each ordinal number an equivalence relation on as follows, where we write for the corresponding quotient topological space projection:
We start the induction with the trivial equivalence relation:
- ;
For a successor ordinal we set
and for a limit ordinal we set
- .
Then:
Other axioms
There are other axioms sometimes included among the separation axioms that don't fit the preceding pattern; but like the others, they all hold of a metric space:
- sober and having enough points,
- semiregular,
- fully normal and fully , which are related to paracompactness (see at fully normal spaces are equivalently paracompact).
Beyond the classical theory
The axioms and below can be phrased entirely in terms of the specialisation order, as follows:
- In general, the specialisation order is a preorder.
- The space is if and only if the specialisation order is a partial order.
- The space is if and only if the specialisation order is an equivalence relation.
- The space is if and only if the specialisation order is the equality relation.
Note that any preorder is the specialisation order for its own specialisation topology.
The separation conditions that appear in and below, or rather their negations, can be easily phrased in terms of the convergence structure, as follows:
- Two points are not distinct if and only if they are equal (of course).
- They are topologically indistinguishable (that is, not topologically distinct) if and only if every net (or filter) that converges to one must also converge to the other; it's enough to check the ultrafilters generated by the two points.
- They are not separated if and only if there exists a net (or proper filter) that converges to both.
So by taking contrapositives, it's easy to generalise and below to convergence spaces. (All of the axioms can be generalised to convergence spaces, since the convergence structure determines the topology, but there are several ways to do so, and it's not clear in general which is best.)
For locales, the axioms at the other end are clearest. Here we want to put everything in terms of open sets, so we simply work with the complements of the closed sets that appear in those axioms. Rather than talk about a closed set and a neighbourhood of , we talk about an open set and an open set such that is the entire space. Now the axioms at the low end are tricky, although there is a standard answer as far down as . (Note that every locale is , indeed sober.)
In constructive mathematics, while the classical definitions all make sense, they are never quite what is wanted. For the low axioms, one may use, as with convergence spaces, conditions that are classically the negations of the separation conditions; for the high axioms, one may use the open sets that are classically the complements of the closed sets in the axioms. In the middle axioms, these work together; for example, the condition that a point is disjoint from a closed set becomes the condition that belongs to an open set .
Specific examples should be found on the pages for specific separation axioms.
History
In Tietze 23, part B, starting on page 300. 4 axioms are discussed, called (in words, not numbers) the first, second, third, and fourth separation axioms (erstes, zweites, drittes, und viertes Trennbarkeitsaxiom). The first of these is , the second is , the third is , and the fourth is . So while this paper may be the first to consider a hierarchy of separation axioms, it is not the source of our notation, and it does not number them in the same way.
All of these after the first are stated in such a way as to not imply the first, and those after the second are similarly stated in such a way as not to imply the second. However, Tietze does seem to want them to be a hierarchy. For one thing, his general definition of topological space — stated in multiple equivalent ways in part A — includes the first separation axiom, so in context it seems that the others are meant to be postulated only of spaces that are already Hausdorff.
Also, after stating the axioms, he immediately provides examples of spaces that satisfy one property but not a higher one, taking care to list both the first and the second separation axiom among those that the third is independent of, but leaving out the second, listing only the first and the third, when listing the axioms that the fourth is independent of. He does eventually give an example of a space that satisfies the second and third but not the first (so a normal regular space that is not Hausdorff), but it is later and more of an afterthought (and the only non-Hausdorff space in this paper). He never asks whether there exists of a regular space that is not normal.
Immediately after this example of a non-Hausdorff space, Tietze 23 lists the axiom after all! But it is not on the same level as the others to him. Instead, it is merely an alternative form of the first separation axiom that may be used in the presence of the second. It still appears that non-Hausdorff spaces are not considered to be real topological spaces worthy of one's attention.
Related concepts
References
An original article is
- Heinrich Tietze, Beitrage zur allgemeinen Topologie. I. Axiome für verschiedene Fassungen des Umgebungsbegriffs, Mathematische Annalen, vol 88, pages 290-311 (1923) (online scan)
Lecture notes:
- Vipul Naik, Topology: The journey into separation axioms [pdf]
See also:
-
Wikipedia, Separation axiom
(This is not really an independent reference, since one of the main authors of the present entry is also one of the main authors of the Wikipedia entry.)
Emphasis on the reflective-category theory:
- Horst Herrlich, George Strecker, Categorical topology – Its origins as exemplified by the unfolding of the theory of topological reflections and coreflections before 1971 (pdf), pages 255-341 in: C. E. Aull, R Lowen (eds.), Handbook of the History of General Topology. Vol. 1, Kluwer 1997 (doi:10.1007/978-94-017-0468-7)
Last revised on November 11, 2025 at 17:56:08. See the history of this page for a list of all contributions to it.